Patrick Grady
Research Scientist at Meta Reality Labs

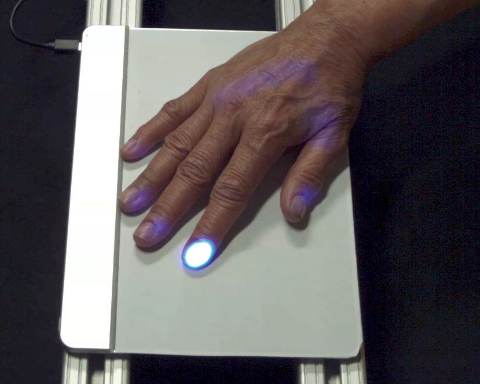
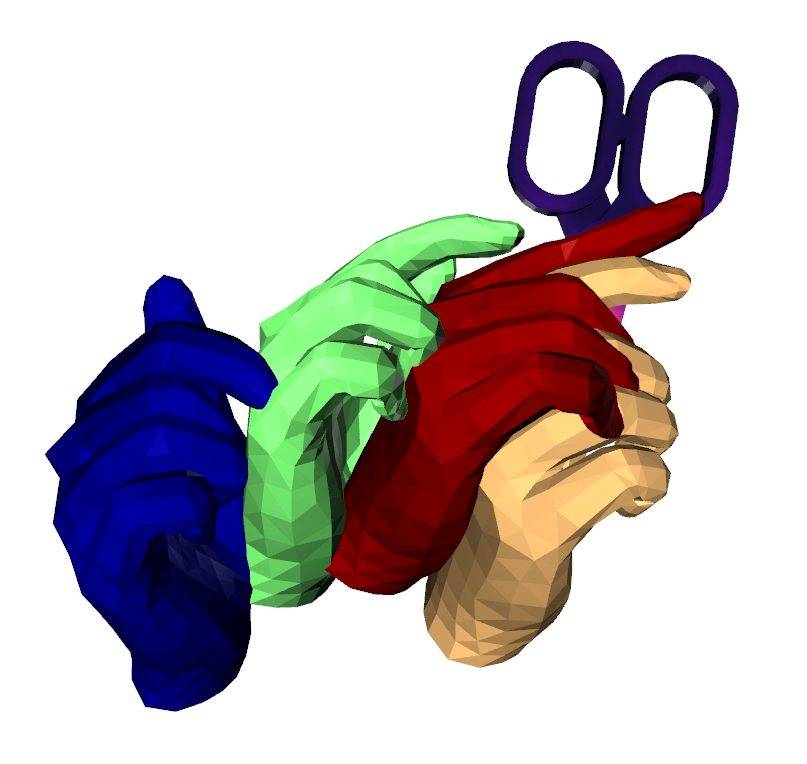
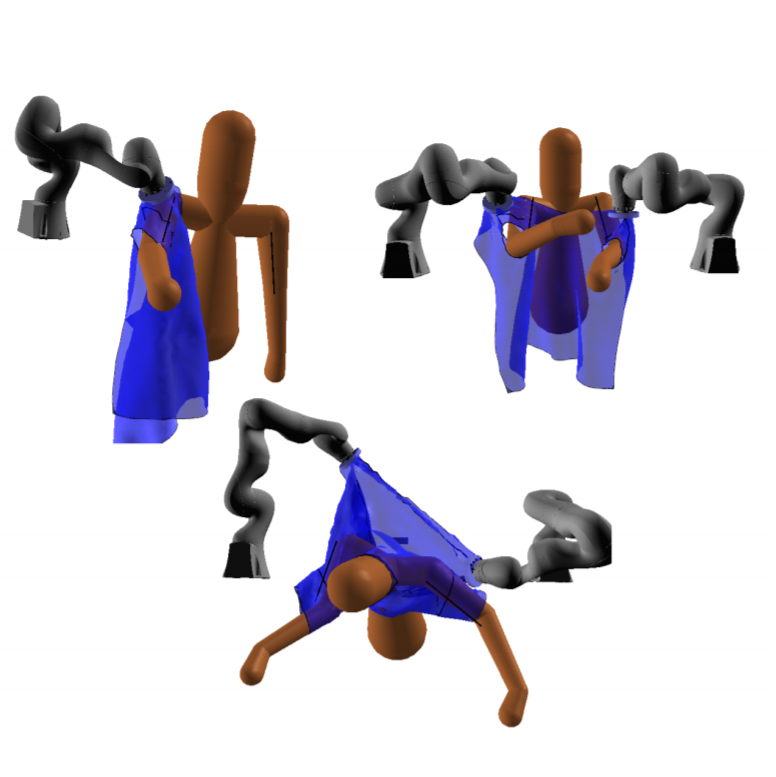
Hi! My name is Patrick; I’m currently a Senior Research Scientist at Meta Reality Labs where I work on computer vision and machine learning for embodied AI. I lead the Surface Touchpad project, which lets you to turn any tabletop into a laptop-style trackpad, using only the cameras on headset. I’ve been lucky enough to work on this project from its inception to shipping as a beta feature! Before joining Meta, I finished a PhD in the Robotics department at the Georgia Institute of Technology. I was advised by Charlie Kemp and James Hays. My research was in vision-based tactile sensing and robotic manipulation, and my work focused on understanding precisely how humans and robots manipulate the world through the lens of contact.
Before grad school at Georgia Tech, I did my undergrad at Duke in computer science and electrical engineering. I got to lead Duke Electric Vehicles, a team of undergraduates building ultra-efficient cars. During my tenure as president, we set the world record for Most Fuel-Efficient Vehicle at 14,573 MPG, and Most Efficient Electric Vehicle at 27,482 MPGe.
In my free time, I like to fly gliders. These are a type of airplane without an engine which use thermals and mountain wave to stay aloft. My longest flight is 9 hours and covered 500 miles, and I hold 21 Georgia and Washington records for soaring. Click here for more! I also enjoy photography and building things with my hands.
publications
-
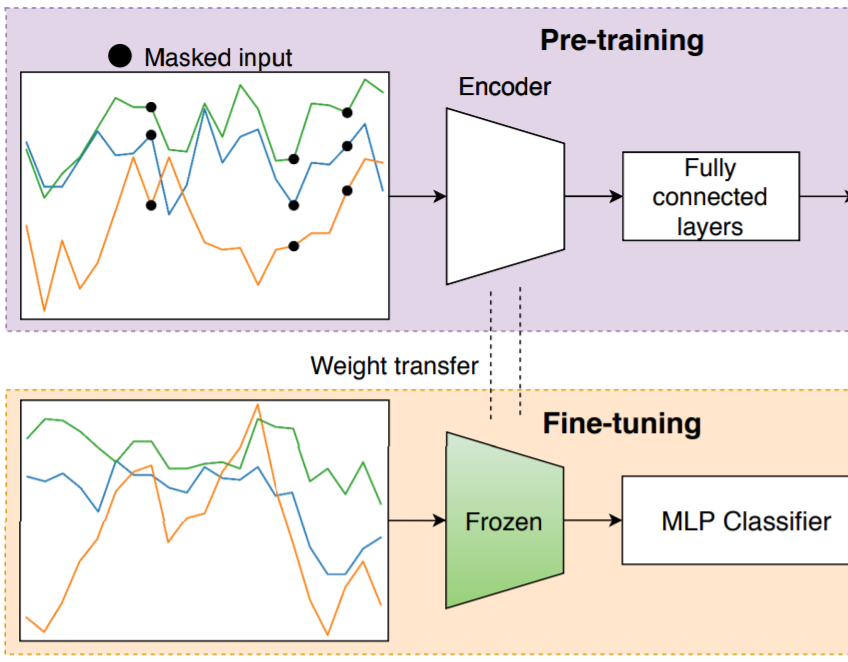 Masked Reconstruction Based Self-supervision for Human Activity RecognitionInternational Symposium on Wearable Computers (ISWC), 2020
Masked Reconstruction Based Self-supervision for Human Activity RecognitionInternational Symposium on Wearable Computers (ISWC), 2020